La situation géographique d’OPTEC Industries, au centre de l’axe transfrontalier des Microtechniques entre Besançon (France) et Neuchâtel (Suisse), nous plonge naturellement au cœur des métiers de la micromanipulation pour le tri ou l’assemblage.
Fort d’une large expérience sur les machines de tri de diamants ronds brillants, nous nous sommes spécialisés depuis 5 ans sur les techniques de micromanipulation à haute cadence.
À titre d’exemple, nous sommes capables de manipuler de manière précise et répétable des pièces de moins de 1 mm3 à des cadences pouvant aller jusqu’à 7 500 pièces/heure
La manipulation pour le tri
- Alimentation à partir du vrac par trémie vibrante, bol vibrant ou élévateur à lames selon la géométrie de la pièce
- En revanche, les cadences doivent être aussi grandes que possible car cette opération ne génère pas une très grande valeur ajoutée
- Il n’est pas nécessaire de “tenir” la pièce pour effectuer les opérations de contrôle/tri
- Distribution sur un plateau rotatif et orientation des pièces par utilisation de leur énergie cinétique et leur facteur de forme
- Espacement des pièces par un système mécanique fixé au dessus plateau rotatif
- Ejection des pièces (tri) par soufflage ou actionneur “à la volée”, depuis le plateau rotatif dans des bacs
L’illustration la plus flagrante de ce concept est le principe de fonctionnement de nos machines de tri de diamants : malgré le facteur de forme très désavantageux des diamants (pièce de forme quasi cubique avec de nombreuses facettes), nos machines les trient selon 10 cotes de mesures à une cadence de 7 500 pierres/heure soit plus de 2 pierres par seconde !
La manipulation pour l’assemblage
Contrairement à la micromanipulation pour le tri, la micromanipulation pour l’assemblage requiert une plus grande expertise.
- Les pièces doivent être bien localisées dans le manipulateur
- Les pièces doivent être correctement maintenues dans le manipulateur
- Les opérations d’assemblage créant généralement plus de valeur que celles de tri, la cadence peut être plus réduite
- Conditionnement d’entrée des pièces (vrac, plateaux, piles…)
- Forme de la pièce - capacité à l’orienter facilement
- La variété de type de produits à gérer avec la même machine
- Précision du positionnement requis (XYZ et angulaire)
- Type d’opération d’assemblage à réaliser (force d’insertion, risque de déformation, risque de chauffe, de projection de matière, process d’assemblage)
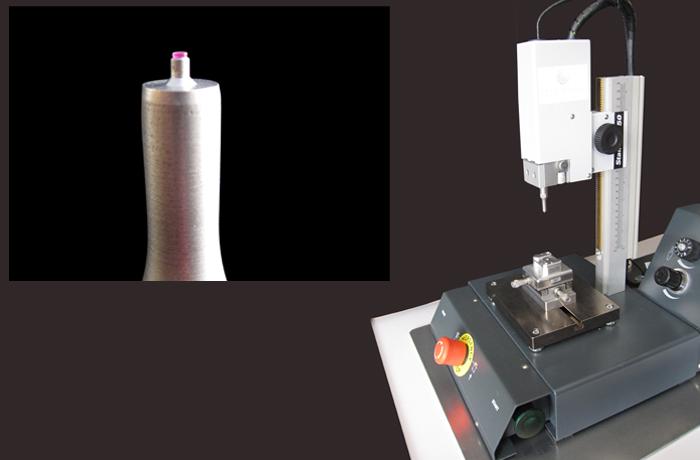
- L’alimentation vibratoire (type bol vibrant)
- L’alimentation par robot-vision sur table vibrante lumineuse
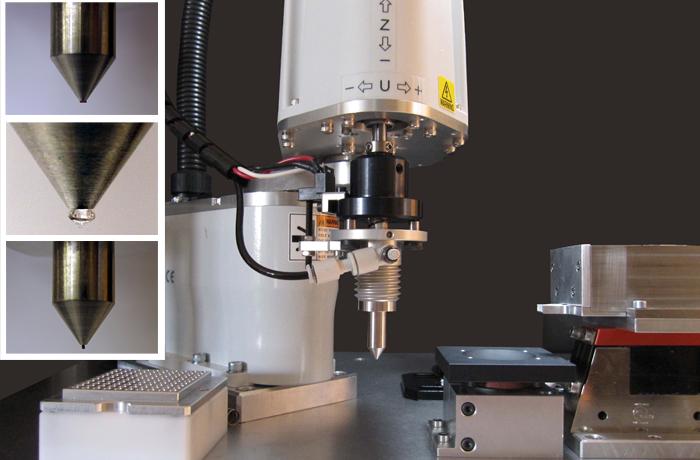
- La manipulation par le vide avec embout standard ou embout de forme
- Doigt de préhension à vide standard ou muni de dévêtisseur
- La manipulation par micro-pince piézo-électrique (concept développé en collaboration avec un partenaire) pour des pièces extrêmement petites et un positionnement ultra-précis
- L’assemblage direct sans recalage de position avec repositionnement “mécanique” dans un posage réalisé en usinage de précision
- L’assemblage après recalage vision grâce aux systèmes vision d’OPTEC Industries
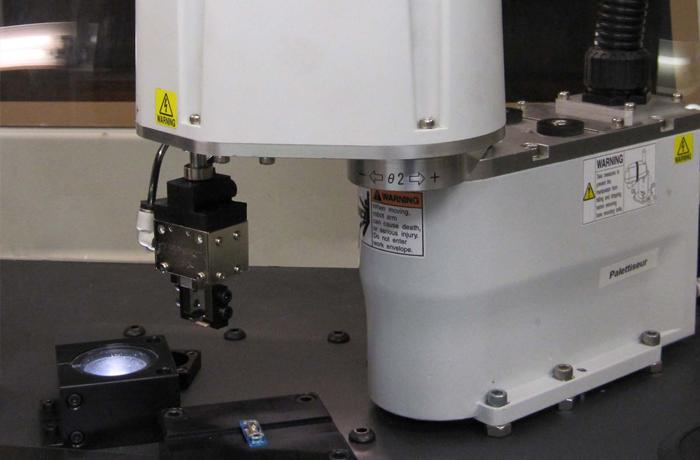
La palettisation
- Une véritable préhension des pièces contrairement à la problématique de tri
- Un objectif de cadence élevée
- Une certaine polyvalence au niveau des types de pièces
- Une précision de positionnement dans le préhenseur qui est n’a pas besoin d’être forte
La solution de palettisation qu’OPTEC Industries a développée est basée sur une trémie vibrante qui alimente une table vibrante lumineuse et une préhension par un robot SCARA 4 axes muni d’une buse de préhension à vide. Cette solution a été éprouvée pour des composants complexes tels que des vis horlogères.